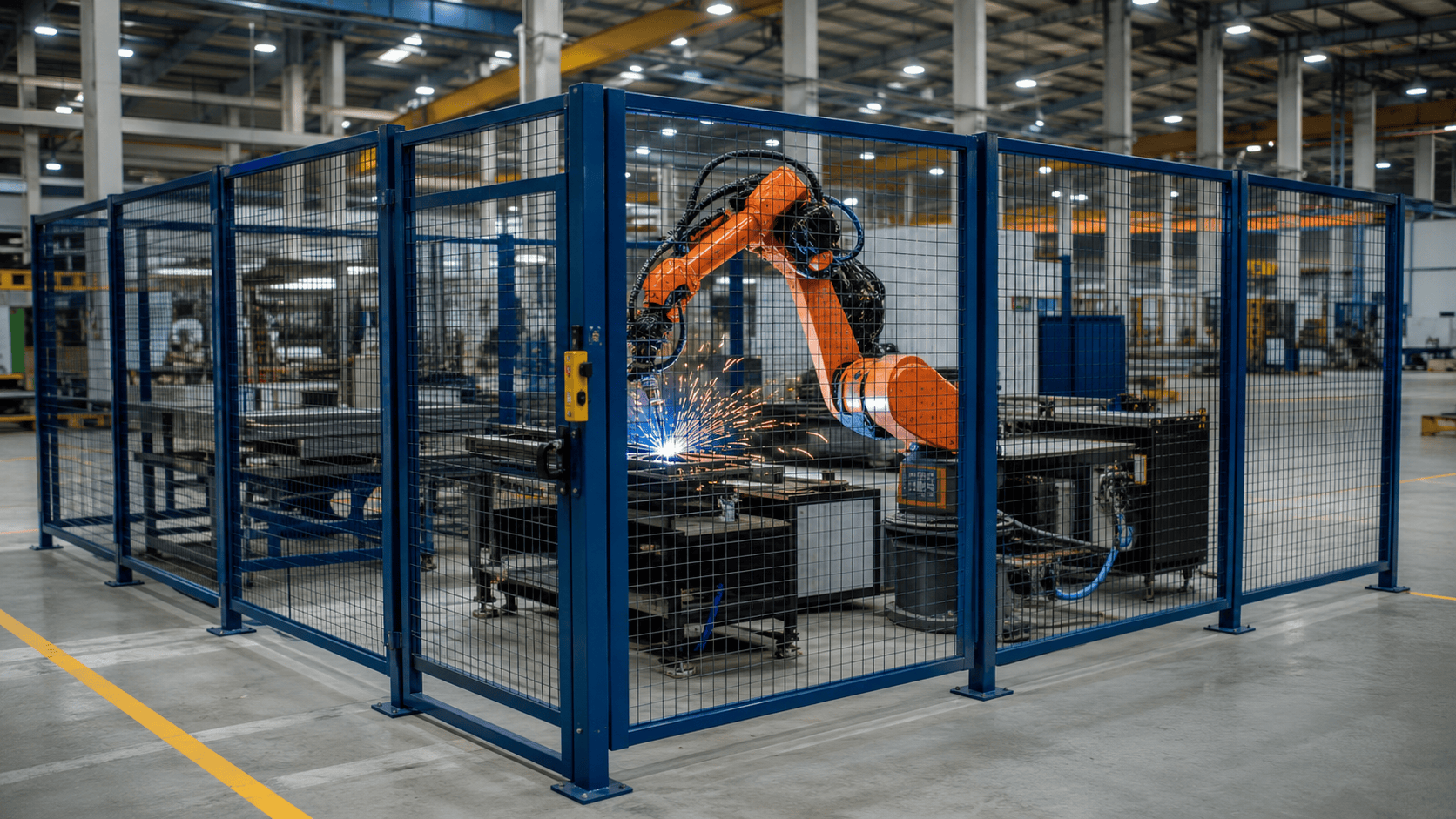
Walk the shop floor of any automotive tier-1 supplier in Chakan MIDC or Ranjangaon MIDC today and you will find at least one industrial robot and in most cases, an entire welding or assembly line of them. Robots have become the defining capital asset of modern Indian manufacturing: faster, more consistent, and more repeatable than any human operator across three-shift production schedules. But they carry a risk profile that no other machine on the factory floor matches. A six-axis robot arm weighing 250 kg, moving at full speed through a programmed path, generates kinetic forces that are lethal if a person enters the operating envelope at the wrong moment. Robot safety fencing is the primary physical barrier between that kinetic energy and the people working around it.
This guide covers everything an Indian manufacturer needs to know about robot safety fencing: the standards that govern it, the engineering requirements that define a compliant installation, the components of a well-designed robot cell perimeter, and the practical decisions that separate a fence that passes an OEM audit from one that generates a major non-conformance finding and delays production approval. For safety officers, plant managers, maintenance engineers, and procurement teams across Pune's MIDC industrial belt, this is the technical foundation for specifying, procuring, and installing robot safety fencing that protects people and holds up to scrutiny.
Why Robot Safety Fencing Is Different from General Machine Guarding
Industrial robots are not simply large machines with moving parts. They are programmable, multi-axis devices whose operating envelope the three-dimensional space swept by the robot arm and any tool or workpiece it carries can change between programs, between shifts, and after programming updates. This dynamic character creates a safety challenge that does not exist with a fixed machine like a press or a lathe: the hazard zone is not constant, and the robot can reach into areas that appear safe based on one program but are hazardous under another.
A conventional machine guard is designed to prevent access to a defined, fixed hazard zone the blade on a saw, the ram on a press, the spindle on a grinding machine. The guard itself defines the boundary. For robots, the fence defines a safe perimeter around an entire cell within which the robot operates, and the fence must be designed to contain any foreseeable movement, including unintended movements caused by software errors, teach pendant mistakes, or mechanical faults. This is why robot cell safety fencing must be designed to a higher specification than standard machine guarding panels and why ISO 10218-2 adds robot-specific requirements on top of the general guarding requirements in ISO 14120.
Additional hazards unique to robot cells include:
- Collision forces: A robot arm collision with the cell perimeter fence at operating speed can transmit enormous forces. The fence structure must be designed to absorb or deflect those forces without structural failure that would allow personnel access to the hazard zone.
- Ejected workpieces and tooling: Welding spatter, machining swarf, or workpieces dropped from grippers can become projectiles. Guard infill panels must prevent ejected material from penetrating through to the surrounding workspace.
- Restricted visibility: Operators and maintenance technicians working around a robot cell need adequate visibility into the cell to monitor the process without entering the guarded zone. Guard design must balance containment with transparency where operationally necessary.
- Multiple access points: Robot cells typically have several legitimate access needs part loading/unloading gates, maintenance doors, conveyor entry/exit points, cable and utilities access panels. Each of these is a potential safety gap that must be individually addressed in the fence design.
- Teach mode hazards: When a programmer or maintenance technician enters the robot cell in teach mode to adjust a program or perform maintenance with the robot powered, specific provisions for reduced-speed operation and enabling device interlocking must be accommodated in the fence design.
The Governing Standards for Robot Safety Fencing in India
Robot safety fencing in India is governed by a suite of international and Indian standards that address different aspects of the complete safety system. Understanding which standard governs which requirement is essential for specifying a compliant installation and for answering auditor questions accurately.
ISO 10218: The Primary Robot Safety Standard
ISO 10218 is the foundational international standard for industrial robot safety, published in two parts. Part 1 (ISO 10218-1) covers the design and construction of industrial robots themselves. Part 2 (ISO 10218-2) covers the integration of robots into systems and cells, and it is the part most relevant to robot safety fencing.
ISO 10218-2 specifies the requirements for robot cell safeguarding, including the design and placement of perimeter fencing. Key requirements from this standard that directly affect fence design include: the maximum dimension of openings in the safeguarding structure, the minimum height requirements for the perimeter fence, the requirements for safeguarding at material entry and exit points where conveyors or transfer systems pass through the fence, and the requirements for integrating the fence interlock system with the robot controller's safety I/O circuit.
ISO 14120: Guard Design and Construction
ISO 14120 adopted as IS/ISO 14120 by the Bureau of Indian Standards provides the general design and construction requirements for guards used on machinery, including the panels, frames, doors, and interlocking provisions that make up the robot cell perimeter. It defines the structural strength requirements, the relationship between aperture size and safe standoff distance from the hazard, and the fastening and hinging requirements that apply to all guards regardless of the machine type they protect. Machine guarding manufacturers who design robot cell fencing must satisfy both ISO 10218-2 and ISO 14120 simultaneously the more stringent requirement of the two applies in any case of overlap.
EN ISO 13857: Safe Distances
EN ISO 13857 provides the safe distance tables that determine how far a guard panel must be positioned from the nearest hazard, based on the size of openings in the guard infill material. For robot cells, this standard is applied to calculate the minimum standoff distance between the perimeter fence panels and the outer boundary of the robot's maximum operating envelope including any workpiece or tool the robot may be carrying at its maximum reach position.
ISO 14119: Interlocking Devices
ISO 14119 governs the design, selection, and installation of interlocking devices fitted to movable guards and access doors. For robot cell safety fencing, this standard specifies the type of safety switch required, the mounting requirements that prevent switch defeat, the cable management requirements, and the coding requirements for switches in high-risk applications.
ISO 13849: Safety-Related Control Systems and Performance Level
ISO 13849 defines the Performance Level (PL) framework for safety-related control circuits. The interlock circuit connecting the robot cell fence door switches to the robot controller's safety I/O must achieve a minimum Performance Level determined by the risk assessment. For most robot cell applications, PLd (Performance Level d) is the minimum requirement, typically implemented using a dual-channel safety relay or safety PLC with cross-fault monitoring. PLe may be required for very high-risk applications involving heavy payloads, high speeds, or processes where the consequences of a fault reaching a person are catastrophic.
Factories Act 1948 and OSH Code 2020
Under Section 21 of the Factories Act 1948, every dangerous part of machinery must be securely fenced. A robot operating in a cell is clearly a dangerous part of machinery under this definition, and an adequately designed robot safety fence is the mechanism by which that obligation is discharged. The OSH Code 2020, which progressively replaces legacy labour laws, reinforces this duty. In practice, compliance with ISO 10218-2 and IS/ISO 14120 is the engineering benchmark used by factory inspectors to evaluate whether a robot cell is "securely fenced" within the meaning of the Act.
Key Regulatory Point for MIDC Factories: Automotive OEMs with manufacturing or assembly plants in Chakan, Talegaon, and Ranjangaon MIDC explicitly require robot cell safety fencing to comply with ISO 10218-2 and ISO 14120 as a condition of supplier qualification. A robot cell that does not meet these standards will receive a major non-conformance finding in supplier safety audits regardless of how substantial the fence appears to an untrained observer.
Components of a Compliant Robot Safety Fencing System
A complete robot safety fencing installation is a system of interdependent components, not simply a collection of fence panels arranged around a robot. Each component must be correctly specified and integrated for the system as a whole to be compliant and effective. The following covers the primary components found in a well-designed safety fence for industrial robots.
Perimeter Frame Structure
The structural frame of the robot cell perimeter is typically fabricated from mild steel square or rectangular hollow sections. The frame provides the primary load-bearing structure of the fence, supports the infill panels, carries the door and gate hardware, and transfers any impact loads from robot collision or ejected material to the floor anchoring system. For robot cell applications, Devidatt Enterprises specifies a minimum frame section of 50mm × 50mm × 3mm RHS for standard cells, with 60mm × 60mm × 4mm sections specified for heavy robot applications with payloads above 100 kg where collision energy requirements are higher.
Frame columns are anchored to the factory floor using M16 or M20 anchor bolts with a minimum embedment depth specified by structural calculation based on the anticipated lateral forces. The anchoring system is a critical structural element a fence that is not adequately anchored to the floor provides no meaningful protection against robot collision and may be dislodged entirely in a severe collision event.
Infill Panels
The infill panels fill the spaces between frame columns and rails. For robot cell applications, the most common infill materials are welded wire mesh panels and polycarbonate sheet panels, each with different performance characteristics and application suitability.
Welded wire mesh panels (weld mesh) provide high structural strength against impact, good ventilation for processes that generate heat or fumes, and high durability in coolant and swarf environments. The aperture size of the mesh must be specified in accordance with EN ISO 13857 safe distance requirements based on the actual standoff from the robot's maximum reach. A 50mm × 50mm aperture is the most common specification for robot cell perimeter fencing positioned at the standard standoff distances typically 500mm to 1000mm outside the robot's maximum reach envelope. The mesh wire diameter must be a minimum of 2mm to provide adequate resistance against penetration by fingers or small tools.
Polycarbonate sheet panels are used in applications where operators need clear visibility into the cell to monitor the welding process, the part quality, or the robot's motion path without entering the cell. Polycarbonate provides excellent optical clarity and reasonable impact resistance, but it is vulnerable to chemical attack from certain welding flux types and solvents, and it degrades under prolonged UV exposure. The polycarbonate grade and thickness must be specified for the specific process environment a 6mm or 8mm thickness is typically the minimum for robot cell applications.
Access Doors and Gates
Every robot cell requires at least one personnel access door to allow maintenance technicians, programmers, and quality inspection personnel to enter the cell when the robot is in a safe state. Most cells require multiple access points a primary maintenance door on one face, and one or more operational gates for part loading/unloading tasks that cannot be automated. Each access door must be fitted with a safety interlock device that connects to the robot controller's safety I/O system.
Access doors must be self-closing designed with return springs or gravity hinges that close the door automatically when released. A door that remains open when not actively held closed creates a permanent safety gap in the perimeter and is a straightforward non-conformance finding under ISO 14120. Doors must also be designed so they cannot be removed from their hinges from outside the cell, as hinge removal would be a simple physical defeat of the guarding system.
For high-use operational gates where part loading and unloading operations require frequent access, a safety interlock with guard locking is required rather than a simple interlock switch. Guard locking holds the door locked closed until the robot has reached a safe state typically confirmed by a safety-rated position monitor or the robot controller's safe state output signal. This prevents the situation where an operator opens the gate during the robot's stopping sequence before the robot has actually stopped, which is a realistic scenario with high-inertia robots that take several seconds to come to rest from full speed.
Safety Interlock System
The safety interlock system is the electronic heart of the robot cell safety fencing. It connects the physical state of every access door and gate to the robot controller's safety I/O system, ensuring that the robot cannot operate in automatic mode while any access point is open. The interlock system consists of: the safety switches on each door and gate, the safety relay or safety PLC that monitors the switch signals and evaluates the safety function, the wiring and cable management connecting these components, and the output interface to the robot controller's safety I/O circuit.
The safety switch type must be selected based on the risk assessment outcome and the required Performance Level. Common switch types used in robot cell applications include:
- Coded magnetic safety switches: Contactless switches that use a coded magnetic key to prevent simple defeat by holding a magnet against the switch. Required where the risk assessment identifies a significant incentive for operators to defeat the interlock to avoid stopping the robot. Coded switches are the standard specification for automotive OEM robot cell applications in Chakan and Ranjangaon MIDC.
- Safety hinge switches: Switches integrated into the hinge of a door or gate, making them inherently tamper-resistant because accessing the switch mechanism requires removing the door. Used for medium-risk applications where switch defeat risk is assessed as moderate.
- Tongue-and-cam mechanical safety switches: Traditional mechanical switches where a metal key attached to the door actuates the switch when the door closes. Suitable for lower-risk applications and secondary access points on cells where higher-specification switches are used on primary doors.
Critical Non-Compliance Finding: A robot cell door fitted with a commercial door magnetic sensor the type used for burglar alarms and building access control is not a compliant safety interlock switch under ISO 14119. Standard magnetic sensors are not safety-rated, do not achieve the required diagnostic coverage for PLd circuits, and can be defeated by external magnets. This substitution is found regularly in MIDC factories where original safety switches have failed and been replaced with readily available commercial alternatives. It will always be cited as a major non-conformance in safety audits.
Material Entry and Exit Safeguarding
Most robot cells receive raw materials and discharge finished parts via conveyors, roller tracks, or transfer systems that pass through the perimeter fence. Each penetration point in the fence is a potential access route to the robot operating envelope, and ISO 10218-2 specifies specific requirements for these openings.
Material entry and exit openings must be sized and positioned such that a person cannot pass through them or such that if the opening is large enough to admit a person, additional safeguarding is provided at the opening. Options for securing material passthrough openings include: fixed guards with apertures below the minimum dimension for body access per EN ISO 13857, light curtains or area scanners that detect personnel presence in the opening and trigger robot stop, physical barriers that restrict the opening to the minimum required for material flow while preventing body access, and interlocked covers or curtains that close the opening when the robot is in automatic mode.
The most common approach in MIDC robot cell installations is a combination of reduced-aperture fixed guarding at the infeed opening sized to allow parts to pass but too small for a hand to reach through to the robot's envelope combined with a light curtain positioned at the opening that stops the robot if a larger object (such as a hand or arm) breaks the light curtain beam.
Robot Safety Barrier Panels
In addition to the main perimeter fence, robot safety barrier panels are used within and around robot cells for specific localised purposes: to separate the robot operating envelope from an adjacent work area, to provide a secondary containment barrier inside the cell for a particularly high-energy robot, or to provide a crash barrier at the entrance to a robot cell where forklift or AGV traffic passes nearby. These barrier panels are typically heavier-gauge construction than perimeter fence panels, often fabricated from solid steel plate rather than mesh, and designed to absorb significant impact energy without structural failure.
Minimum Height Requirements for Robot Safety Fencing
ISO 10218-2 specifies minimum height requirements for robot cell perimeter fencing based on the reach of the robot and the height of any tool or workpiece the robot may carry at its highest point. The fence height must prevent a person outside the fence from reaching over the top of the fence into the robot's operating envelope.
| Robot Maximum Reach Height (including tooling/workpiece) | Minimum Fence Height (ISO 10218-2) | Typical Application |
|---|---|---|
| Up to 1800mm | 1800mm (1.8 metres) | Small payload robots, benchtop welding cells |
| 1800mm to 2200mm | 2200mm (2.2 metres) | Medium payload robots, arc welding cells |
| Above 2200mm | Full robot reach height plus 500mm | Large payload robots, press tending, palletising |
These are minimum heights. In practice, Devidatt Enterprises recommends a standard fence height of 2000mm for small to medium robot cells and 2400mm for large robot cells, with the specific height confirmed against the robot's actual maximum reach position including all tooling and maximum workpiece dimensions during the design survey. A fence that is technically sufficient for the current robot program may be insufficient if the program is later modified to use a taller tool or carry a larger workpiece designing to a margin above the minimum reduces future compliance risk.
Safe Distance Calculation for Robot Cell Fencing
One of the most technically consequential decisions in robot cell fencing design is where to position the perimeter fence relative to the robot. The fence must be far enough from the robot's maximum reach envelope that a person standing at the fence panel and reaching through an aperture in the infill cannot touch the robot or any workpiece it carries. This distance is calculated using the safe distance tables in EN ISO 13857.
The calculation requires three inputs: the maximum reach of the robot (including tooling and workpiece at maximum extension), the aperture size of the infill material in the fence panels, and the relevant reaching distance for a person through that aperture size from EN ISO 13857. The fence must be positioned so that the distance from the outer face of the fence panel to the nearest point of the robot's maximum envelope exceeds the safe distance from EN ISO 13857 for the chosen aperture size.
For the 50mm × 50mm weld mesh aperture standard in most Devidatt Enterprises robot cell fence installations, the EN ISO 13857 safe distance (the maximum reach distance through a 50mm aperture) is 850mm. The perimeter fence must therefore be positioned at least 850mm outside the boundary of the robot's maximum reach envelope on all sides. This is not the distance from the robot base it is the distance from the outermost point the robot arm, tool, and workpiece can reach at any position in its working program, measured at each face of the fence.
In practice, this means that a 6-axis robot with a maximum horizontal reach of 1800mm and a maximum reach at height of 2100mm requires a fence footprint that provides at least 850mm clearance from those maximum reach boundaries on all sides producing a minimum cell footprint of approximately 5.3m × 5.3m for that robot, before accounting for fixtures, material feed equipment, control cabinets, and operator access paths within the cell.
Integration with Robot Controller Safety I/O
A robot safety fence is not a standalone physical structure it is part of an integrated safety system that connects physical access control to the robot's motion control. The fence interlock circuit must be connected to the robot controller's designated safety I/O ports in a way that meets the Performance Level requirements established by the risk assessment.
Every major industrial robot manufacturer ABB, FANUC, KUKA, Yaskawa Motoman, and others provides a safety I/O interface on their robot controller specifically for connecting external safety devices such as fence door switches, light curtains, emergency stop buttons, and area scanners. The safety I/O is designed to be monitored by the controller's internal safety function processor, which evaluates the state of all connected devices and transitions the robot to a safe state when any device signals a safety breach.
The specific wiring architecture required depends on the target Performance Level. For PLd the standard requirement for most robot cell applications a dual-channel wiring architecture is used: each safety switch provides two independent output contacts, both of which must agree that the door is closed before the safety function permits robot motion. If either channel fails or disagrees with the other, the safety function detects the discrepancy (cross-fault detection) and maintains or transitions the robot to a safe state. This prevents a single electrical fault a short circuit, a stuck contact, or a wiring error from causing a loss of the safety function.
Teach Mode and Maintenance Access Provisions
The most complex aspect of robot cell safety fencing design is providing for the legitimate need of programmers and maintenance technicians to enter the cell while the robot is powered a situation that creates an inherent conflict between access needs and safety requirements. ISO 10218-2 addresses this through requirements for teach mode and restricted-speed operation provisions that must be integrated into the fence design.
In teach mode, the robot is controlled via a teach pendant a hand-held device connected to the robot controller and is limited to a maximum speed of 250mm/s at the robot's tool centre point. The technician inside the cell operates the robot in this restricted mode while physically observing the robot's motion, using the teach pendant's three-position enabling switch to permit robot motion only while the switch is actively held in the mid-position (releasing the switch or pressing it fully through stops the robot immediately).
For teach mode operation, the fence door interlock must either be bypassed under a controlled teach mode authority with the mode change supervised by a safety-rated mode selector key switch, not a simple programme change or the technician must carry a portable safety device (a wireless enabling device) that maintains the robot in restricted-speed mode and provides an enabling function while inside the cell. The specific implementation depends on the robot controller model and the cell's operational requirements, and it must be evaluated during the risk assessment for the cell.
Robot Safety Fencing for Collaborative Robot Applications
Collaborative robots cobots are increasingly used in Indian manufacturing, particularly for assembly, inspection, and part handling tasks where the cobot works in close proximity to human operators without a physical perimeter fence. Cobots are designed to operate safely in the presence of humans through a combination of force/torque limiting, speed and separation monitoring, and restricted power and force levels defined in ISO/TS 15066.
However, the absence of physical fencing for a cobot application does not mean the absence of safeguarding. ISO/TS 15066 specifies the biomechanical limits for contact forces and pressures that the cobot must not exceed, and the cobot's speed must be reduced based on the distance to the nearest human, monitored by area scanners or safety-rated vision systems. Physical fencing may still be required for certain cobot applications for example, where the cobot handles sharp parts or hot materials that would be hazardous to contact even at low force, or where the process creates hazards (weld spatter, UV radiation) independent of the robot's contact force.
Devidatt Enterprises designs industrial machine safety fencing solutions for both traditional industrial robot applications requiring full perimeter guarding and hybrid configurations where partial fencing is combined with area scanning and light curtains for processes that require some human-robot proximity while maintaining a controlled safe zone for the most hazardous parts of the robot's motion cycle.
Common Non-Conformances Found in MIDC Robot Cell Safety Audits
Based on site survey experience across Pune MIDC manufacturing facilities, the following non-conformances are most frequently identified in robot cell safety fencing installations during OEM audits and factory inspections.
| Non-Conformance | Root Cause | Applicable Standard |
|---|---|---|
| Fence door held open during automatic operation by a wedge or latch | Operator convenience defeating the interlock to avoid robot stops during part loading | ISO 10218-2, ISO 14119 |
| Safety switch replaced with non-safety-rated commercial sensor | Original switch failed; replaced with readily available substitute without safety rating | ISO 14119, ISO 13849 |
| Fence panel removed and not replaced (open gap in perimeter) | Panel removed for maintenance access or utility routing and not reinstalled | ISO 14120, ISO 10218-2 |
| Fence height insufficient for robot reach height with current tooling | Tooling or end-of-arm equipment changed after original fence installation without re-evaluating fence height | ISO 10218-2 |
| Material passthrough opening large enough to admit a person | Original conveyor width undersized; infeed opening enlarged without adding additional safeguarding | ISO 10218-2, EN ISO 13857 |
| Single-channel interlock wiring (no cross-fault detection) | Original installation wired single-channel; PLd requirement not met | ISO 13849, ISO 14119 |
| No guard locking on high-frequency operational gate | Simple interlock switch used on gate where stopping time requires guard locking | ISO 14119, ISO 10218-2 |
| Fence not anchored to floor, or anchor bolts missing | Fence installed as free-standing without floor fixings to allow future repositioning | ISO 14120 |
How Devidatt Enterprises Designs Robot Safety Fencing Systems
Every robot safety fencing system manufactured and installed by Devidatt Enterprises follows a structured design and installation process built around ISO 10218-2, ISO 14120, and companion standards. Our process for MIDC clients includes the following stages as standard practice.
Site Survey and Robot Reach Mapping
Before any design work begins, our engineering team conducts a site survey that maps the robot's maximum reach envelope in three dimensions including all programmed and potential tool positions, maximum payload dimensions, and any auxiliary equipment mounted on the robot arm. The survey documents the physical constraints of the factory space, the location of columns, utilities, and adjacent equipment that affect fence layout, and the material flow paths that determine the number and position of access doors and material passthrough openings.
Safe Distance Calculation and Fence Layout Design
Based on the site survey data, we calculate the required minimum standoff distance from the robot's maximum reach envelope to the inner face of the fence panels, using EN ISO 13857 safe distance tables for the specified mesh aperture size. The fence layout is designed to provide at least the minimum standoff on all sides while fitting within the available factory floor space and accommodating all required access and material flow points.
Structural Design and Material Specification
The fence frame structure is specified based on the robot payload, the calculated collision energy (for heavy robot applications), and the panel span lengths in the layout. Frame section sizes, column spacing, base plate dimensions, and anchor bolt specifications are determined by structural calculation and documented in the design record. Infill panel type (weld mesh, polycarbonate, or combination) is selected based on the process environment, visibility requirements, and the projectile hazard assessment for the specific robot cell process.
Interlock System Specification
The interlock system is specified in conjunction with the robot cell integrator's safety plan. Switch type, quantity, and mounting positions are determined for every door and gate in the fence layout. The safety relay or safety PLC architecture is specified to meet the required Performance Level. The interface to the robot controller's safety I/O is designed in accordance with the robot manufacturer's safety integration guidelines for the specific controller model in use.
Fabrication, Installation, and Commissioning
All fence components are fabricated in our Pune manufacturing facility to the approved design drawings. Powder coat finish is applied as standard, with hot-dip galvanizing available for outdoor or high-corrosion environments. Installation at the client site is carried out by our trained installation team. Commissioning includes functional testing of every interlock switch door open: robot stops; door closes: robot restart enabled documented in a commissioning record signed by our installation engineer and the client's safety officer.
Compliance Documentation Package
Every Devidatt Enterprises robot cell fencing installation is accompanied by a compliance documentation package that includes: design drawings with standoff distances and fence dimensions, structural calculations and material specifications, safe distance calculation records, interlock switch data sheets and safety circuit architecture diagram, Performance Level verification summary (for PLd dual-channel circuits), and the signed commissioning record. This documentation package is specifically structured to support OEM supplier safety audit submissions and factory inspection responses.
Need Robot Safety Fencing for Your MIDC Facility?
Devidatt Enterprises designs, manufactures, and installs robot safety fencing systems built to ISO 10218-2 and IS/ISO 14120 with full compliance documentation. Serving Chakan, Bhosari, Ranjangaon, Talegaon, and all Pune MIDC zones.
Phone: +91 8975383232
Email: info@devidattenterprises.com
Website: www.devidattenterprises.com
Manufacturing Facility: H.No. 40/3 Pathar Bhag, Dhankawadi, Pune, Maharashtra 411046
Frequently Asked Questions: Robot Safety Fencing
1. What is the minimum height for robot safety fencing under ISO 10218-2?
ISO 10218-2 specifies that robot cell perimeter fencing must be a minimum of 1800mm (1.8 metres) in height for robots with a maximum reach height below 1800mm, and must match or exceed the robot's maximum reach height for larger robots. In practice, the standard minimum for most industrial robot applications is 2000mm, and cells with large payload robots operating above 2000mm require fencing of 2200mm or greater. The fence height must prevent a person standing outside the fence from reaching over the top into the robot's operating envelope which means that where people of above-average stature or standing on elevated surfaces could reach over a nominally sufficient fence, additional height or an inward-facing top rail must be provided.
2. What type of safety switch is required for robot cell access doors?
The required safety switch type depends on the Performance Level determined by the risk assessment and the potential for switch defeat. For most automotive and precision manufacturing robot cells in MIDC, coded magnetic safety switches meeting Category 3 PLd requirements are the standard specification. These switches are tamper-resistant (requiring a coded key that cannot be defeated by an external magnet), provide dual-channel output for PLd circuit architecture, and are suitable for mounting in the door frame position where they are not exposed to mechanical shock from door operation. Standard commercial door sensors, magnetic contacts used in alarm systems, and single-channel mechanical switches do not meet the requirements for robot cell applications where PLd is required.
3. Does robot safety fencing need to be re-evaluated when the robot program changes?
Yes. Any change to the robot's program that affects the maximum reach of the robot arm, the size or position of the tool or workpiece, or the speed profile of the robot's motion may affect the adequacy of the existing safety fencing. A program change that increases the robot's maximum reach height could make an existing fence height insufficient. A change to a larger end-of-arm tool could reduce the clearance between the tool and the fence panel to below the minimum safe distance. A formal change assessment comparing the new program parameters against the original fence design parameters should be conducted and documented for any significant program modification.
4. What is the difference between an interlock and a guard-locking interlock on a robot cell door?
A standard interlock switch on a robot cell door sends a signal that stops the robot when the door opens, but the door itself can be physically opened at any time. A guard-locking interlock physically locks the door closed and releases the lock only after the robot has reached a confirmed safe state typically zero speed, confirmed by a safety-rated speed monitor. Guard locking is required where the robot's stopping time is long enough that a person could open a standard interlocked door, step toward the robot, and reach the hazard zone before the robot has actually stopped. This is the case for most medium to large industrial robots operating at full speed, which may take 1 to 3 seconds to decelerate to rest time during which the robot is still moving and capable of causing serious injury.
5. Can light curtains replace physical fencing for robot cells in India?
Light curtains can replace or supplement physical fencing for specific access points in robot cells, but they cannot replace the perimeter fence entirely for standard industrial robot applications. ISO 10218-2 permits the use of electro-sensitive protective equipment (ESPE) including light curtains as safeguarding at material entry/exit openings and at operational access points where physical guarding would impede the process. However, physical fencing remains required for the main perimeter to contain ejected materials, provide a physical barrier against inadvertent access, and give the cell a defined and visible safe boundary. Light curtains are typically used in combination with the physical fence at infeed/outfeed openings, at loading/unloading stations, or on one face of the cell where process visibility requirements make panel guarding impractical.
6. What documentation should accompany a robot safety fencing installation?
A compliant robot safety fencing installation should be accompanied by: the risk assessment that determined the guard type, interlock specification, and Performance Level requirement; design drawings showing the fence layout, panel dimensions, door and gate positions, and standoff distance calculations; structural calculations or material specifications confirming the frame and panel adequacy for the collision energy and process hazards; interlock switch data sheets confirming the switch's safety rating and Performance Level contribution; the safety circuit architecture diagram showing the dual-channel wiring to the safety relay or safety PLC and the connection to the robot controller's safety I/O; and the signed commissioning record confirming that every interlock was functionally tested and verified at installation. This documentation package is what an OEM auditor or factory inspector will request to verify compliance and its absence is itself a non-conformance finding even if the physical installation is correct.
7. How often should robot safety fencing and interlock systems be inspected and tested?
ISO 10218-2 and ISO 14119 both require that safety guarding systems be maintained in effective working condition and periodically tested to confirm continued function. A recommended inspection and testing schedule for robot cell safety fencing is: monthly visual inspection of all fence panels, doors, and interlock switches for visible damage, loose fasteners, missing components, and signs of switch defeat; quarterly functional testing of every interlock switch (confirming that opening each door causes robot stop and prevents restart); and annual formal inspection of the complete guarding system against the original design specification, including safe distance verification and structural condition assessment. Results of all inspections and tests should be recorded in a maintenance log. Devidatt Enterprises provides inspection checklists tailored to each installation with our compliance documentation package.
This article provides an educational overview of robot safety fencing for the benefit of safety professionals, plant managers, and procurement engineers working in Indian manufacturing. It does not constitute legal or engineering advice. Specific robot cell guarding design must be undertaken by a qualified machinery safety engineer applying the full suite of applicable standards to a specific robot system risk assessment. For compliance-critical applications, always engage a certified functional safety engineer.
*Standard details referenced in this article are based on ISO 10218, ISO 14120, ISO 14119, ISO 13849, and companion standards as published and adopted by BIS. Always verify current standard revisions through the ISO or BIS publication portals before applying to engineering design.